Trajectoires prévues
Les segments nominaux, les trajectoires d’attente, les zones de travail et les éventuelles zones de transition doivent être lisibles.
Parcours fictif TRX-Drone · étape 8/16
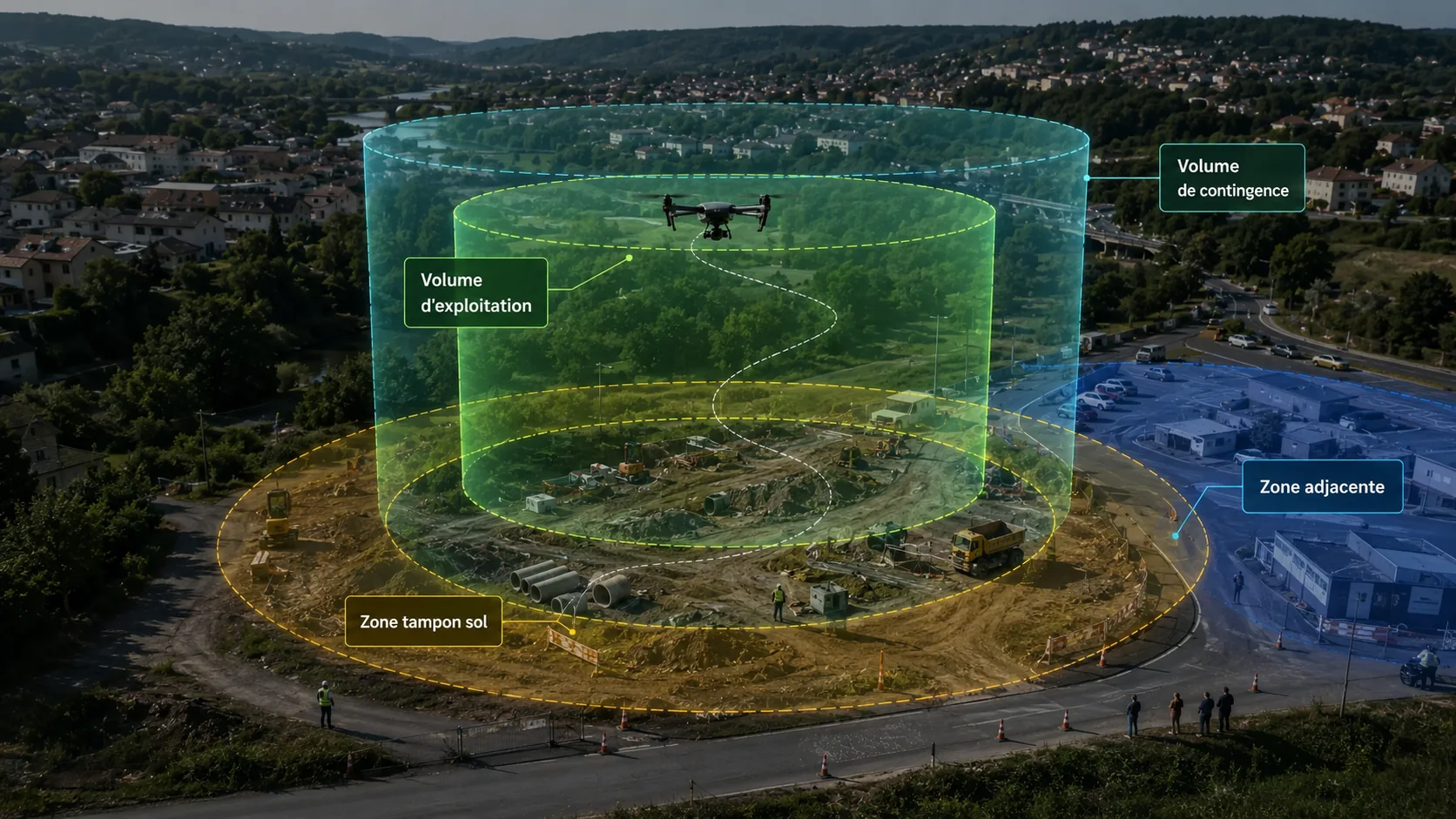
Cette page montre que la description de l’opération ne se limite pas à une trajectoire dessinée sur une carte. TRX-Drone doit distinguer le volume d’exploitation, le volume de contingence, la zone tampon sol et les zones adjacentes concernées par l’opération.
Ces volumes ne sont pas de simples formes géométriques. Ils traduisent ce que l’exploitant prévoit, ce qu’il accepte comme marge de sécurité, ce qu’il doit surveiller et ce qu’il doit éviter de laisser dériver hors contrôle.
Cette étape conditionne la suite de l’analyse SORA : une description imprécise des volumes fausse ensuite l’analyse du risque sol, du risque air, des mitigations et des exigences opérationnelles à justifier.
Après avoir documenté l’opération envisagée, TRX-Drone doit transformer la mission décrite en volumes et en zones exploitables. Cette étape n’est pas un simple dessin sur une carte. Elle prépare directement la détermination du risque sol initial, l’analyse de l’exposition au sol et les notes de calcul qui seront utilisées ensuite.
Dans la SORA 2.5, la cohérence entre la documentation de l’opération, la géographie de vol, le volume de contingence, le volume opérationnel et la zone tampon sol est déterminante. Si ces éléments sont imprécis, le risque sol initial et l’iGRC reposeront sur une base fragile.
Dans le cas client fictif traité par TRX-Drone, la base issue de l’analyse PDRA reste utile. Elle doit toutefois être complétée : la SORA impose de cartographier plus finement les volumes, de justifier les marges retenues et d’anticiper la zone dans laquelle la densité de population devra être évaluée.
À l’étape précédente, TRX-Drone a démarré l’analyse SORA par la description de l’opération. Cette page précise les volumes, les zones et l’empreinte opérationnelle.
La première erreur consiste à parler d’une “zone de vol” comme si elle suffisait à décrire l’opération. Dans une SORA, TRX-Drone doit distinguer plusieurs notions. La géographie de vol correspond aux trajectoires prévues. Le volume de contingence correspond à la zone dans laquelle l’exploitant peut encore agir pour faire revenir le drone ou l’amener vers un état sûr. La zone tampon sol correspond à la zone de crash potentielle à prendre en compte.
Le volume opérationnel est constitué de la géographie de vol et du volume de contingence. Il ne doit pas être confondu avec la zone tampon sol. Cette distinction est essentielle, car le risque sol et la densité de population exposée ne seront pas appréciés de manière sérieuse si les zones sont dessinées ou nommées approximativement.
Pour TRX-Drone, la difficulté n’est donc pas seulement de tracer une carte. Elle est de montrer pourquoi chaque contour est retenu, comment il est dimensionné et comment il sera tenu pendant l’opération.
Avant de parler de zone adjacente, TRX-Drone doit distinguer deux notions souvent confondues. La géographie de vol correspond à l’espace dans lequel l’opération est normalement conduite. Le volume de contingence correspond à la marge prévue pour gérer une sortie du volume nominal sans considérer immédiatement que l’opération est perdue.
Ces deux éléments conditionnent ensuite la lecture de la zone adjacente. Si la géographie de vol, le volume de contingence et la zone pouvant être atteinte après perte de maîtrise sont confondus, le dossier peut paraître propre sur une carte tout en restant fragile dans son analyse de risque.
La zone adjacente ne doit pas être réduite à une formule unique ou à une marge dessinée mécaniquement. Elle sert à regarder ce qui pourrait être atteint si l’UAS sort du volume opérationnel, dérive, subit un vent défavorable, perd sa liaison ou conserve une autonomie suffisante pour poursuivre hors de la zone nominale.
Cette analyse complète le volume opérationnel et le ground risk buffer. Elle aide à vérifier si une zone plus sensible pourrait être touchée en cas de perte de contrôle ou de fly-away.
Dans un dossier pédagogique comme celui de TRX-Drone, l’objectif n’est pas de fixer une règle simplifiée, mais d’expliquer pourquoi le raisonnement doit dépasser la carte nominale.
La zone adjacente est un point de vigilance majeur. TRX-Drone ne doit pas seulement montrer où le drone est censé voler. Elle doit aussi se demander ce que l’UAS pourrait atteindre en cas de sortie du volume opérationnel, de perte de contrôle, de dérive, de vent défavorable ou d’autonomie restante suffisante.
Cette notion est souvent mal comprise parce qu’elle ne correspond pas à une simple zone de travail. Elle oblige à regarder au-delà du dessin nominal : routes, habitations, établissements sensibles, rassemblements possibles, aérodromes, hélistations, activités aériennes voisines ou espaces dans lesquels une sortie de volume aurait des conséquences plus sévères.
Dans le cas client fictif traité par TRX-Drone, l’analyse de la zone adjacente sert donc de garde-fou. Si une zone voisine plus exposée peut être atteinte dans un scénario raisonnablement envisageable, le dossier doit l’expliquer, la cartographier et montrer comment ce risque est empêché, réduit ou traité.
| Notion | Ce qu’elle décrit | Question à poser | Risque si elle est oubliée |
|---|---|---|---|
| Volume opérationnel | Géographie de vol et volume de contingence dans lesquels l’opération doit rester maîtrisée | TRX-Drone peut-elle tenir réellement ce volume pendant toute la mission ? | Confondre trajectoire prévue et volume réellement maîtrisable |
| Zone tampon sol | Zone de crash potentielle prise en compte autour du volume opérationnel | La distance retenue est-elle cohérente avec vitesse, vent, énergie et hypothèses de perte de maîtrise ? | Sous-estimer l’empreinte utilisée pour le risque sol |
| Zone adjacente au sol | Zone voisine pouvant être atteinte en cas de sortie du volume ou de perte de contrôle | Une zone plus sensible peut-elle être atteinte malgré les limites nominales ? | Ignorer une exposition plus sévère hors du volume dessiné |
| Espace aérien adjacent | Espace voisin susceptible d’être concerné si l’UAS sort de son volume prévu | Un trafic habité, une procédure, une hélistation ou une contrainte aérienne voisine peuvent-ils être affectés ? | Fragiliser l’analyse du risque air et l’ARC final |
La SORA ne se limite pas à tracer une zone de vol. Elle oblige à distinguer la trajectoire nominale, le volume dans lequel l’exploitant peut encore agir, les zones exposées au sol, les zones adjacentes et l’empreinte utilisée pour apprécier le risque sol initial.
Le fichier KML ou KMZ est souvent perçu comme une pièce cartographique annexe. Dans une SORA, il joue un rôle plus structurant. Il doit permettre de comprendre la géographie de vol, la zone de contingence, la zone tampon sol et, lorsque c’est pertinent, la position du télépilote, des observateurs, du public ou d’une zone réglementée temporaire.
Pour TRX-Drone, ce fichier doit être cohérent avec la documentation de l’opération envisagée. Si le texte décrit une trajectoire, mais que le KML montre une zone plus large, la démonstration devient ambiguë. Si le KML est trop restrictif par rapport à la réalité de mission, l’opération décrite ne sera pas réalisable dans les conditions annoncées.
La bonne pratique consiste donc à utiliser le KML/KMZ comme un outil de cohérence : il matérialise les hypothèses, aide à identifier les zones exposées, sert de base aux échanges internes, puis soutient la justification du risque sol et du risque air.
Les segments nominaux, les trajectoires d’attente, les zones de travail et les éventuelles zones de transition doivent être lisibles.
Le dossier doit montrer où TRX-Drone considère qu’un écart reste récupérable par une action prévue et maîtrisée.
La zone tampon doit être dessinée de manière cohérente avec les hypothèses de crash, de vitesse, de vent et de perte de maîtrise retenues.
Télépilote, observateurs, aides au sol, zones de décollage et d’atterrissage peuvent devoir être indiqués si ces positions structurent la maîtrise de l’opération.
Lorsque des zones de présence possible du public ou de tiers non impliqués sont identifiées, elles doivent être prises en compte dans l’analyse.
La représentation doit rester compatible avec les espaces, restrictions, zones temporaires ou contraintes locales qui seront ensuite utilisées pour l’analyse du risque air.
Définir les volumes ne suffit pas. TRX-Drone doit aussi préparer les données qui permettront de justifier les distances retenues et l’empreinte utilisée pour l’iGRC. Ces données seront reprises dans l’étape suivante, mais elles doivent être identifiées dès maintenant pour éviter une rupture entre la carte, la note de calcul et le raisonnement réglementaire.
| Donnée à préparer | Rôle dans l’analyse | Point de vigilance TRX-Drone |
|---|---|---|
| Masse retenue | Base technique pour les scénarios d’impact et la cohérence du dossier | Ne pas confondre masse théorique, MTOM et configuration réelle de mission |
| Dimension caractéristique | Entrée structurante pour l’iGRC en SORA 2.5 | Retenir une valeur justifiable par fiche technique ou mesure documentée |
| Vitesse maximale | Entrée de l’iGRC et donnée critique pour les distances et marges | Ne pas retenir seulement la vitesse prévue si une vitesse commandable plus élevée est possible |
| Vent arrière défavorable | Hypothèse aggravante possible pour les scénarios d’écart et de crash | Documenter l’hypothèse retenue au lieu d’utiliser une marge arbitraire |
| Autonomie utile | Appréciation de la durée d’exposition et des scénarios de dérive ou de retour | Distinguer autonomie constructeur, autonomie exploitable et réserve opérationnelle |
| Atteinte possible d’une zone adjacente | Vérification de ce que l’UAS peut atteindre hors volume opérationnel en cas de perte de contrôle | Ne pas limiter l’analyse à la zone nominale si l’autonomie, la vitesse ou le vent peuvent conduire vers une zone plus sensible |
| Densité de population | Entrée nécessaire pour déterminer l’iGRC | Retenir la densité maximale pertinente dans l’empreinte exposée |
L’empreinte utilisée pour l’iGRC n’est pas une zone abstraite. Elle découle de la géographie de vol, du volume de contingence, de la zone tampon sol et des hypothèses techniques retenues. Elle sert ensuite à identifier la densité maximale de population exposée pour le risque sol initial.
Dans le cas fictif, TRX-Drone doit donc éviter deux erreurs opposées. La première serait de réduire artificiellement l’empreinte pour obtenir une densité plus favorable. La seconde serait de retenir une zone trop large, sans lien avec l’opération réelle, ce qui conduirait à durcir inutilement le raisonnement.
La bonne approche consiste à conserver la cohérence entre ce qui est décrit, ce qui est cartographié et ce qui sera calculé. L’étape suivante pourra alors examiner le risque sol initial sans devoir revenir en arrière sur la définition des volumes.
La première erreur serait de dessiner une zone globale unique. Cette approche rend le dossier difficile à instruire, car elle masque les différences entre trajectoire nominale, contingence, tampon sol et exposition réelle.
La deuxième erreur serait de produire une cartographie qui ne correspond pas au texte de la documentation de l’opération envisagée. Une carte et un texte qui ne racontent pas la même opération créent une incohérence majeure.
La troisième erreur serait de reporter les calculs à plus tard. Les volumes, la vitesse, le vent, l’autonomie, la zone tampon et la densité de population sont liés. Les traiter séparément conduit souvent à une SORA difficile à justifier.
La définition des volumes ne doit pas rester purement cartographique. TRX-Drone doit documenter les hypothèses qui justifient la géographie de vol, le volume de contingence et les marges retenues. Dans une approche prudente, le temps nécessaire pour détecter une dérive, décider et déclencher une procédure de contingence doit être explicité.
Pour un dossier destiné à l’instruction, il peut être utile de documenter une hypothèse de réaction du télépilote, par exemple quelques secondes entre la détection de la sortie du volume nominal et l’ordre d’action. Lorsque le FTS ou la coupure moteur n’est pas automatique, il faut également tenir compte du délai propre au système : réception de l’ordre, déclenchement effectif et, le cas échéant, activation du moyen de réduction de l’énergie à l’impact.
Ces valeurs ne doivent pas être présentées comme une formule universelle. Elles doivent être justifiées par le système utilisé, les essais, les procédures, la formation de l’équipage et les attentes de l’autorité compétente.
Dernière mise à jour : 25 mai 2026